tomiwroc6
-
Liczba zawartości
132 -
Rejestracja
-
Ostatnia wizyta
Zawartość dodana przez tomiwroc6
-
Oprócz ściany jest jeszcze jedna kwestia której się obawiam, czyli czy stan po wyburzeniu będzie również zgodny z prawem. Bo jak czytam to nie wszystko można zrobić, np. połączyć ot tak kuchni z pokojem itp. Nie chciałem tego robić w ciemno bo potem może się właśnie okazać że coś jest nie tak, i wyrok będzie na moją niekorzyść. Liczyłem że złoże zgłoszenie a to już jakiś urzędnik oceni czy tak można. Jak widać wszystko w naszym wspaniałym kraju jest przerzucane na obywateli i to ja muszę zatrudnić architekta żeby zrobił to za nich...
-
Tak, chodzi o sąsiadów, a wniosek wyciągnąłem po tym jak na próbę zrobiłem dziurkę w ścianie żeby sprawdzić co i jak. Kucie trwało max 30 sec i zaraz po fakcie usłyszałem jak uczynny sąsiad wali zapewne głową, w swoją ścianę z wściekłości.
-
No właśnie problem w tym że jednak takie sprawy się toczą. W jednym z podanych przypadków nawet zgłoszenie nie uchroniło przed sądem. Problem jest taki że jak widać do sądu i tak się trafi, a każda sprawa jest inna i potem trzeba tylko liczyć że w tym wypadku będzie wszystko w porządku. Dlatego pytam czy to da się wcześniej zweryfikować, czy jednak jedyna opcja to rzeczywiście trzeba najpierw zburzyć i zdać się na los bo wtedy dopiero sąd zajmie się wyjaśnieniem.
-
Tak budynek wielorodzinny, wspólnota, zarządca nieruchomości twierdzi że muszę zgłosić to do urzędu. Potwierdzenie mam od inżyniera z uprawnieniami konstrukcyjnymi. Boję się sytuacji gdy przyjdzie nadzór budowlany i pomimo samego potwierdzenia możliwości wyburzenia nałoży karę za brak zgłoszenia.
-
W chwili obecnej mam już taki mętlik w głowie że chciałem i tutaj zasięgnąć pomocy. Chodzi o wyburzenie ściany działowej pomiędzy dwoma pokojami. Mam już pisemne potwierdzenie że ścianę można wyburzyć, tylko został problem zgłoszenia tego faktu. I tutaj, jak to z urzędami bywa pojawił się problem. Z tego co wyczytałem do tej pory, takie przedsięwzięcie nie powinno wymagać żadnego zgłoszenia. Dla własnego spokoju chciałem to jednak zrobić i okazało się że o zgłoszeniu mogę zapomnieć, natomiast muszę składać wniosek o pozwolenie na budowę. Ze względu na koszty które mogą przewyższyć samo wyburzenie i fakt że na czas remontu już się przeprowadziliśmy i w tej chwili płacimy za czynsz w dwóch miejscach, taka opcja odpada. Tutaj jest chyba dobrze to z puentowane. Niestety jak to zwykle z prawem bywa, jest tyle niedopowiedzeń że nie wiem już jak do tego się zabrać.W tym artykule napisane jest że nie każde wyburzenie musi wymagać pozwolenia. W takim razie moje pytanie jest takie, jak to jednoznacznie i formalnie ustalić. Mam rozumieć że mam zburzyć a potem zdać się na sąd, czy będzie kara czy nie ? I druga kwestia jak zabrać się do tego od strony formalnej. Z tego co mi powiedziano mam złożyć wniosek o pozwolenie na budowę, jednak skoro wyroki sądów są takie a nie inne, chce złożyć wniosek o zgłoszenie robót. Czy urzędnik ma obowiązek przyjęcia takiego wniosku, jak to wymusić ? Nie wiem czy dobrze rozumiem, ale żeby cokolwiek zrobić powinienem złożyć takie zgłoszenie, i wtedy dostać z urzędu sprzeciw i dopiero wtedy mogę walczyć dlaczego wniosek został odrzucony ? Naprawdę już mam tego dosyć, sprawa miała być prosta wszystko już było zorganizowane przeprowadzka, ekipa do zburzenia a teraz takie problemy... Miał ktoś może już taki problem ? I czy mogę prosić o pomoc w pokierowaniu tą sprawą ?
-
Skoro sytuacja w końcu opanowana, czas się odstresować i trochę poświętować . Chciałbym wszystkim serdecznie podziękować za pomoc, i życzyć spokojnej końcówki świąt
-
> Wrzoc zdjecie tego na dole... > Krawiec Zdjęcie postaram się zrobić przy najbliższej okazji. Nie mam w tej chwili kluczy do szafki Oki jest światło, można zagotować wodę, więc na razie tragedii nie ma . Teraz pewnie pierwsza szansa na kontakt z elektrykiem dopiero w poniedziałek... Jak rozumiem, lepiej nie przeciążać instalacji do momentu naprawy ?
-
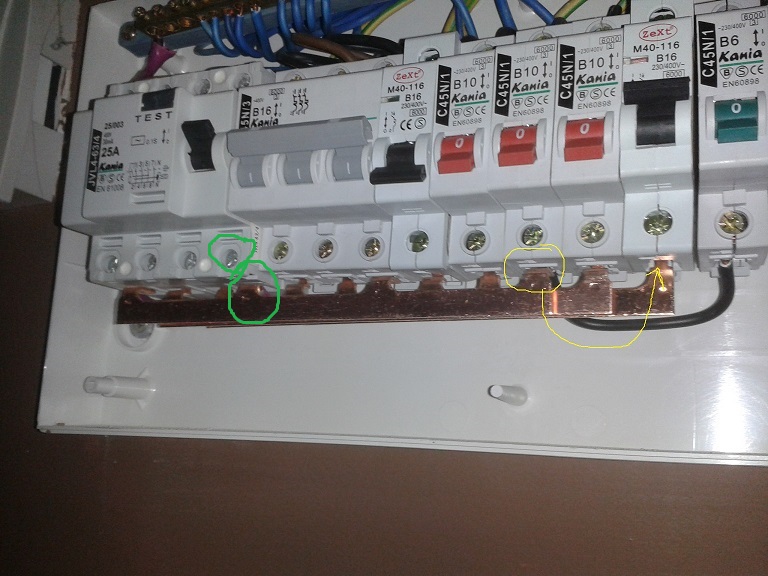
> Jedni dają szyny inni zwory z przewodów. > Zaznacz na foto który bezpiecznik odpowiada za tan obwód który aktualnie działa oraz zaznacz który > odpowiada za oświetlenie. Ostatni ( zielony B6 ) to światło, na lewo od niego jest ten działający ( B16 )
-
No cóż, dziękuje wszystkim za pomoc. Podsumuje czy dobrze zrozumiałem. Pomimo odcięcia prądu poprzez wyłącznik przed licznikiem, dalej w domu jest prąd na jednej fazie ( co nie ma prawa mieć miejsca ). Licznik sygnalizuje awarię. W przypadku jeżeli uszkodził się przełącznik, czy jest to sytuacja zagrażająca bezpieczeństwu ? Skoro płyta działa, to chyba zamiast niej podłączenie światła raczej nie zaszkodzi ?
-
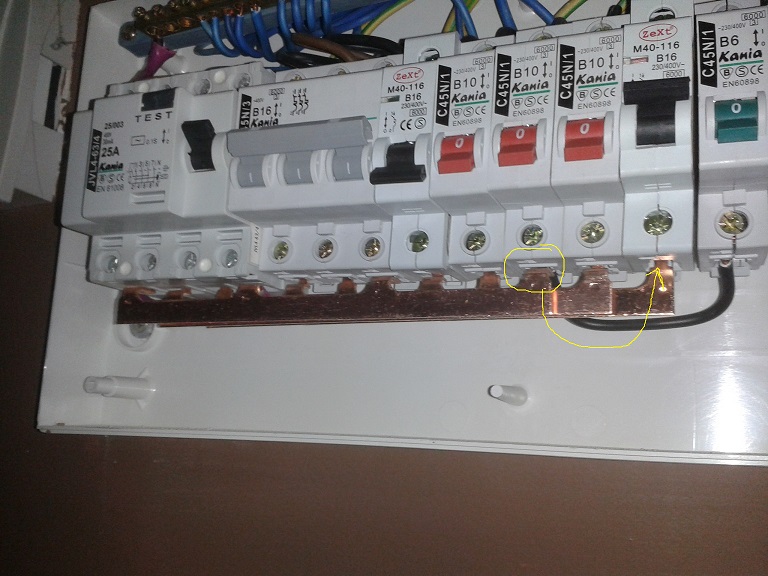
> Wszystko wyłącz i wtedy miernik i mierz czy na którejś z szyn jest napiecie (pomiędzy szyną a > niebieskim przrwodem w róznicówce). Jeśli nie ma to możesz próbować, ale mimo wszystko rób to > izolowanymi szczypcami i jeśli się da jedną ręką (drugą się nie dotykaj w tym momencie > niczego) i bardzo uważaj! > To rozwiązanie jest tymczasowe, bo i tak będzie potrzebny fachowiec. Tzn. tak jak widać jest od początku, jak rozumiem zamiast tego kabelka powinna być dłuższa szyna ? Bo widać elektryk który to montował miał gorszy dzień, albo nie dał rady policzyć ilości bezpieczników...
-
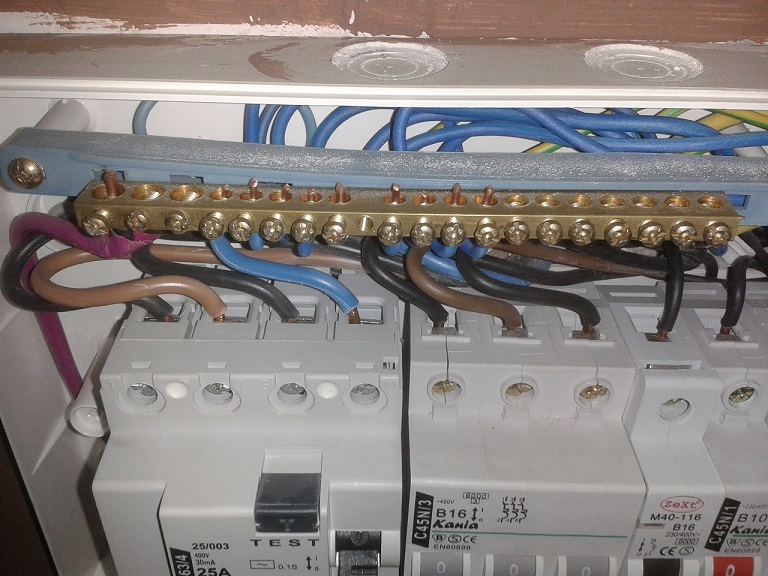
> Rózowy i niebieski przewód z róznicówki są połączone z szyną N. Nie wiem czy dobrze rozumiem, jeżeli chodzi o to czy zaznaczone na zielono jest połączone, to nie, bolec na szynie jest ucięty i nie wchodzi do bezpiecznika.

-
> Tak, tylko odepnij miedziana listwe najpierw... A potem ta jedna faze mozesz podpiac do > bezpiecznika swietlnego. > Krawiec Ok, to jeszcze jedno, jeżeli wszystkie pstryczki powyłączam ( będą na dół ), to na 100% jestem bezpieczny, czy jednak jak za dużo podotykam na raz to będzie źle ? ( ze mną )
-
> Jak to jest zabezpieczenie przedlicznikowe to chyba nie jest wlasnoscia wspolnoty. No chyba ze > jednak jest to zabezpieczenie glowne za licznikiem... > A dioda awaria moze oznaczac klopoty i to duze... > Krawiec Czyli jest to podstawa aby wykłócać sie o interwencje tauronu ? Bo powiedzieli że to nie ich własność i ich to nie interesuje. Do kogoś z administracji mogę pomarzyć że się dodzwonie. W takiej sytuacji jeszcze mam dwa dosyć istotne pytania . Czy dobrze rozumiem że : Jeżeli bez utraty życia uda mi się przepiąć ten kabelek to będe miał światło ? Działa ta faza na tej szynie, a teraz światło jest podpięte do innej szyny czyli drugiej fazy ? I druga sprawa, jak widać na zdjęciach dwa bezpieczniki zostały podmienione na z B10 na B16, czy to może być jakiś problem formalny ? Bo jak kiedyś mieliśmy kontrolę instalacji to pytałem się czy można tak zamienić i dostałem potwierdzenie. Było coś o tym że jak jest przekrój min. 2.5mm to można taki bezpiecznik. Wymiana była w kuchni, bo nie dało się gotować wody i piec jednocześnie.
-
> Ale burdel. Ciekaw jestem w jakim celu jest zmostkowany neutralny na roznicówce? > Czy prąd na tym jednym odbiorze jest cały czas czy tylko, kiedy podniesiona jest różncówka > (pierwszy, poczwórny od lewej)? > Czy prąd na tym jednym odbiorze jest cały czas czy tylko kiedy podniesiony jest odpowiadający mu > wyłącznik (drugi od prawej)? > I jakbyś mógł zrobić fotkę taka jak od dołu ale trochę bardziej od frontu aby było dokładnie widać > jak wychodzą styki do wyłączników, bo pod tym katem znowu nie jest to jednoznaczne? > Wygląda mi na to, że upalone solidnie jest coś po drodze między zabezpieczeniem głównym, na dole a > tablica w mieszkaniu a lampka to był przypadek albo języczek u wagi? Być może sam licznik, > może stopiona izolacja kabli po drodze z długotrwałego przeciążenia?
-
> Cala? Czy tylko polowa ( zasilana ze sprawnej fazy)? Jakie masz zabezpieczenie przedlicznikowe? > Krawiec Tak, dokładnie działa tylko połowa płyty Na dole niestety nie widać wystaje tylko ta wajcha do przełączania
-
> Co to za licznik? Jest nim jakis model? Inna sprawa ze licznik jest wlasnoscia ZE. Mowiles im o > swiecacej sie tej diodzie. Nie mowiłem, licznik niestety nie wiem, teraz nie mam do niego dostępu... Czy w takiej sytuacji jak napisałeś z tą jedną fazą, można coś zrobić żeby było światło ? Bo jak rozumiem to całego mieszkania poprzez ten jeden bezpiecznik raczej nie da się obsłużyć... ?
-
> I bezpieczniki przed licznikiem wylaczone wszystkie? To albo sie ktorys posypal i mimo wylaczonego Tak, to jest taki wyłącznik zespolony > Obecnie do mieszkania dochodzi ci jedna faza. Stad tez prad w tych obwodach ktore sa do niej > podpiete. Do tego jeszcze działa płyta grzewcza... lepiej jej nie ruszac ? Ona nie jest na dwie fazy ? > Probowales odpalic bezpieczniki na dole przy wylaczonej roznicowce? Tak, wszystko było powyłączane > Sprawdz czy jest napiecue miedzy zaciskami 7 roznicowki ( ostatni gorny prawy) a listwa uziemiajaca > bo jest jeszcze jedna mozliwosc... 0v
-
Aż boję się pytać, a na ile jest możliwość że uszkodził się ten wyłącznik przed licznikiem ? Skoro dalej jest jakiś prąd w mieszkaniu ? Czy to może być też problem samego licznika ? Świeci się na nim dioda Awaria. Jeżeli tak to pewnie z miesiąc mogę zapomnieć o naprawie
-
Wyłączona różnicówka : Tylko napięcie ( 40v ) pomiędzy 3-1,2,3 a pomiędzy 3-4 240v. Włączona : Napięcie 240v pomiędzy 3 - 1,2,4 oraz 1,2,4 - 3 Tak to wygląda od dołu. A tak od góry
-
> Tak. > Nacisnij test na roznicowce ( powinna wyskoczyc ). A potem sprawdz na ktorych zaciskach wejsciowych > ( te u gory) jest napiecie. > Mierzysz miedzy szyna z niebieskimi kablami a wejsciami roznicowki. Tylko ostroznie co by cie nie > porazilo...( probnik jest w tym wzgledzie bezpieczniejszy). > Ile masz bezpiecznikiw orzedlicznikowych? Trzy czy jeden? > Krawiec Na dole jest włącznik potrójny.
-
> Masz probnik? Taki srubokret z lampka? > Krawiec A może być mernik ?
-
Lampka oczywiście odłączona, tzn. wymieniona żarówka i teraz działa normalnie ( na przedłużaczu z drugiego pokoju ) . Pisząc że wszystkie mam wyłączone chodziło mi o moment kiedy próbowałem podnieść ten wyskakujący na dole. Czy jak bym przepiął kabelek z ostatniego bezpiecznika ( światło ) do tego obok działającego, to jest szansa że nastanie jasność ?
-
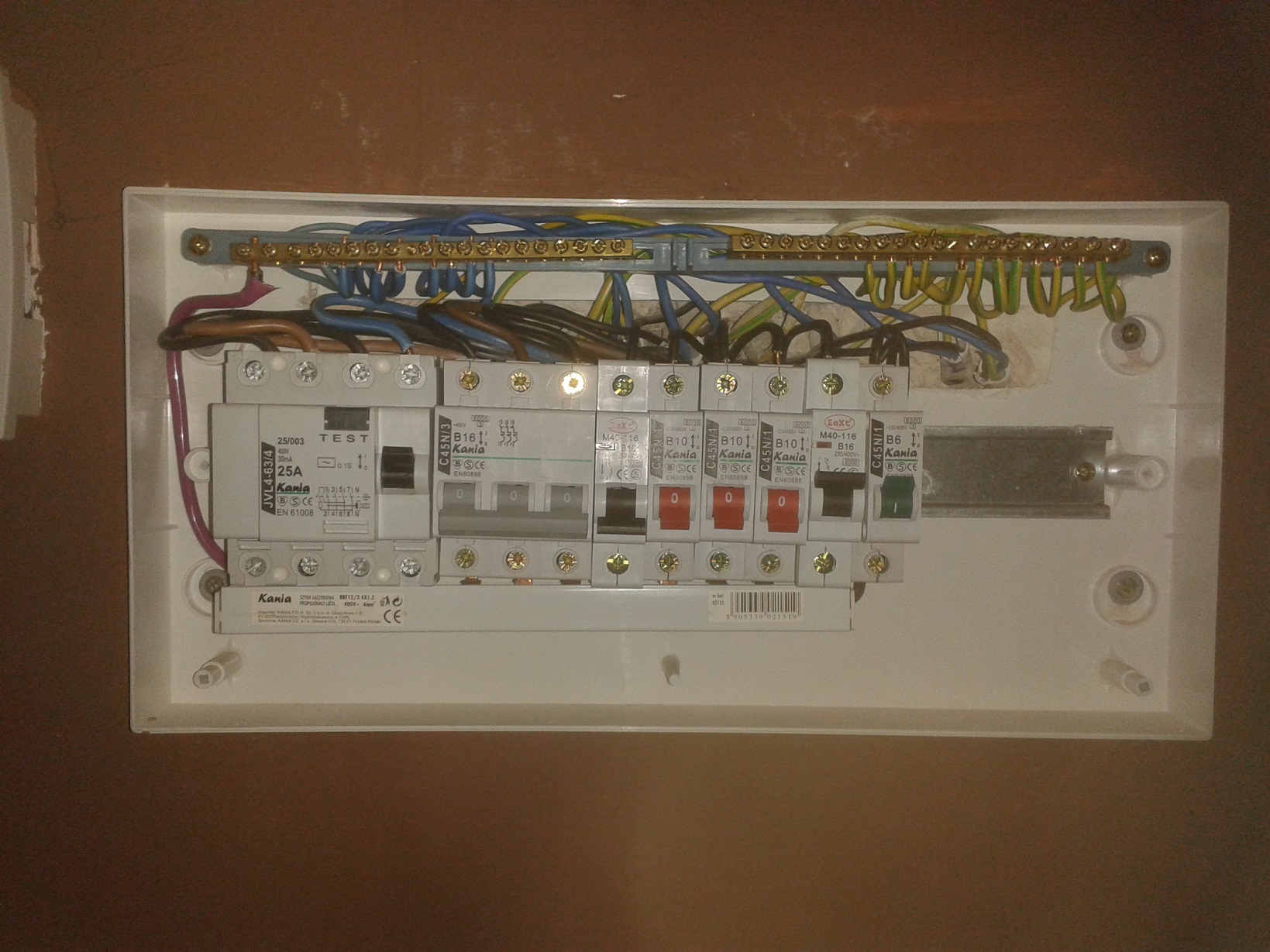
> Masz napięcie w obwodach gniazdkowych mimo wyłączonego > zabezpieczenia przed licznikowego i tych w tablicy rozdzielczej ? No właśnie tak to wygląda, wyłącznik przed licznikiem ( ten na dole ) jest wyłączony - nie chce się podnieść, a pomimo tego jest prąd w jednym obwodzie - tym podłączonym do przedostatniego bezpiecznika. > Wylacz roznicowke i wtedy sprobuj podniesc ten przedlicznikowy. Jeżeli dobrze rozumiem - wszystkie bezpieczniki na tej tablicy ze zdjęcia ( jest w mieszkaniu ), zostały wyłączone ( wszystkie pstryczki na dole ), a pomimo tego cały czas wybija wyłącznik na dole... >Hmm, dlaczego w tej tablicy masz poza dwoma bezpiecznikami i > różnicówką odłączone pozostałe bezpieczniki? Bezpieczniki powyłączane bo nie ma w nich napięcia, oprócz tego jednego - przedostatniego, obwód z gniazdkami w jednym pokoju. Ten ostatni od światła, pomimo że podniesiony, też nie działa. Wiem że to dziwne , sam tego nie pojmuje, ale chociaż da się włączyć również światło w aktualnej sytuacji ? Instalacja nie zmieniana od początku od 10ciu lat, do tej pory nie było problemów. A teraz jedna mała żaróweczka tak nabroiła i to akurat teraz...
-
Niestety w tym roku było chyba za mało życzeń spokojnych świąt. Wczoraj wieczorem przy włączaniu lampki smyka przepaliła się żarówka. Niestety efekt tego zdarzenia trochę mnie załamał. Sytuacja jest następująca : W tablicy na dole tam gdzie liczniki główny włącznik dla mieszkania ( przed licznikowy ) nie chce się podnieść. Ciągle wyskakuje, na naszym liczniku świeci się jakaś lampka awaria. Próbowałem włączać ten włącznik główny przy wyłączonych wszystkich bezpiecznikach w mieszkaniu. Niestety bez efektu. Tauron oczywiście odmawia pomocy ze względu że to własność wspólnoty. Natomiast do administratora pewnie dodzwonić będzie się można dopiero po nowym roku... co i tak może dużo nie dać, bo wymiana przepalonych żarówek zajęła mu ostatnio dwa miesiące. Sytuacja byłaby beznadziejna gdyby nie fakt że prąd jest, ale w jednym obwodzie, tzn. działają gniazdka podłączone do jednego bezpiecznika. Niestety taka sytuacja niepojęta mnie przerosła skąd prąd skoro główny przełącznik jest wyłączony. Dodatkowo działa też płyta grzejna. Na przedłużaczu podłączona jest teraz lodówka, da się zrobić wodę itp, niestety nie ma światła i nie wiem jak długo to podziała w ten sposób, dlatego boję się podłączać coś więcej. Ma ktoś pomysł co z tym zrobić ? Dlaczego działa tylko jeden bezpiecznik ? Czy rzeczywiście nie można domagać się interwencji tauronu ? Ze względu na smyka jakoś nie widzę szansy żebyśmy tak dłużej wytrzymali. Za wszelkie porady byłbym bardzo wdzięczny. Dołączam zdjęcie tablicy w mieszkaniu. Pozdrawiam.
-
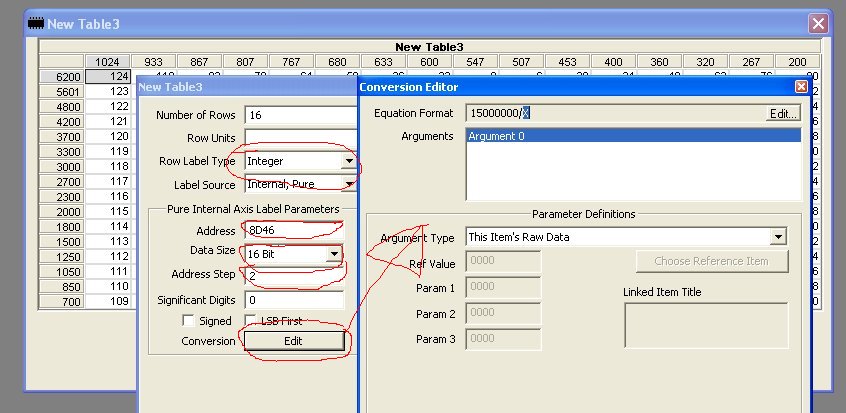
Skoro światło dzienne ujrzał już taki temat to myślę że można coś dodać i od siebie. Tak wogóle to również polecam ten program ze względu na duże możliwości konfiguracyjne. Co zresztą zaraz zaprezentuje na przykładzie. Na początek główna zasada. Wiadomo jest że ECU przechowuje sobie dane nastawne zależne od parametrów pracy. Ze względu na małą pojemność sterownika trzeba było pójść na kompromis pomiędzy ilością ( szczegółowością ) danych a zajętym przez nie miejscem. Czyli np. nie podajemy wartości dla obrotów z dokładnością do 10 RPM tylko dzielimy cały zakres na np. 16 części , a wartości pomiędzy wartościami bazowymi wyliczamy na podstawie interpolacji. Dzięki zastosowanej technice, że podział nie musi być liniowy czyli nie dokładnie co RPM/16 możemy dać większą szczegółowość w danym zakresie ale mniejszą w innym. No i zawsze można zwiększyć rozdzielczość zmieniając zakres z 16 na np 24 ( kosztem objętości pamięci). System oparty jest na indeksach. Czyli za pomocą specjalnego przypisania, wartości X przypisujemy dany indeks bazowy i przesunięcie względem kolejnego. Czyli coś jak dzielenie całkowite i reszta z dzielenia. Przypisanie to jak wspomniałem może być dowolne ( nieliniowe ) Taki przykład : Dla wartości od 0...10 możemy zrobić mapę przypisania np. 0 , 2 , 6 , 8 Co znaczy tyle że dla wartości do 2 indeks będzie 0 dla wartości 1 dokładnie 0.5 wartości pomiędzy 2 a 6 dostaną wszystkie indeks 1. + oczywiście reszta z dzielenia 0 = 0 1 = 0.5 2 = 1.0 , 3 = 1.25 , 4 = 1.5 , 5 = 1.75 , 6 = 2.0 I teraz przechodząc do sedna sprawy, wczytując do programu tablice korekcji czasu wtrysku zależną od obrotów i ciśnienia za dużo w sumie nie wiemy . Nawet znając tablice konwersji MAP i RPM na obroty zawsze to trzeba sobie jakoś w pamięci przeliczać na odpowiednią komórke. Tutaj z pomocą przychodzi program, gdzie dla każdej osi można przypisać tablice konwersji na indeks, braną z tego samego wsadu. Wtedy dostaniemy ładnie opisaną oś. Dla przykładu zdefiniujemy sobie oś obrotów. Ponieważ obroty są opisywane przez czas obrotu w us dobrze by było sobie to przeliczyć na prawdziwe RPM. Tutaj również jest to możliwe za pomocą edytora konwersji wartości za pomocą zdefiniowanych obliczeń. Dzięki takim zabiegom mamy ładnie i czytelnie opisany wykres. To tyle tak na szybko, jeżeli są jakieś błędy to oczywiście oczekuje na sprostowanie, bo chciałem to zrobić szybko w odpowiedzi na zaczęty wątek i mogły się wkraść jakieś nieścisłości